Electromagnetic Hovercraft
/ 2 min read
Inspired by electromagnetic propulsion techniques found in Hyperloop, mag-lev trains and other novel ground transportation systems I designed a controllable electromagnetic hovercraft that is able to levitate above nonferrous conductive materials such as aluminum by taking advantage of Lenz’s law. As a thruster made of permanent magnets arranged in a Halbach array spins above the aluminum sheet, eddy currents with an opposing magnetic field are induced in the sheet creating a repulsive force. Four independent electromagnetic thrusters actuated by four servomotors can be arranged in a quadcopter formation to allow for 3-axis control of the hovercraft. Control of the hovercraft is implemented using a PID controller based on accelerometer and gyroscope sensor data. The hovercraft frame is entirely 3D-printed and went through several iterations aimed at maximizing stiffness and reducing motor vibrations. The hovercraft is powered by a 4-cell 1800 mAh lithium polymer battery which yields a flight time of 4 minutes. A video of the hovercraft in operation is presented below.
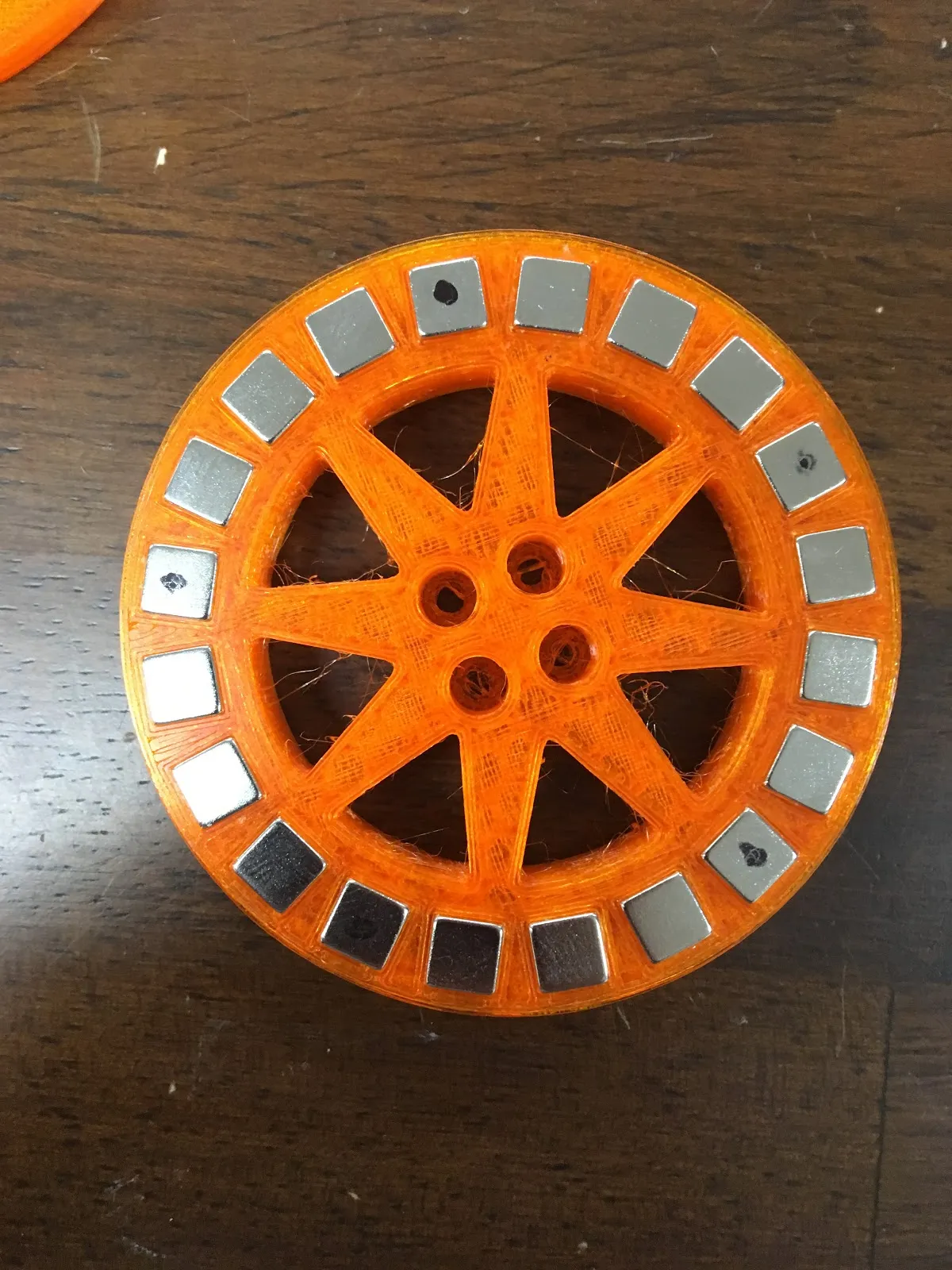
The electromagnetic hovercraft thruster creates lift by inducing an opposing magnetic field in the conductive surface below it as it spins.
The Halbach array thruster side profile, as seen through magnetic field viewing film.
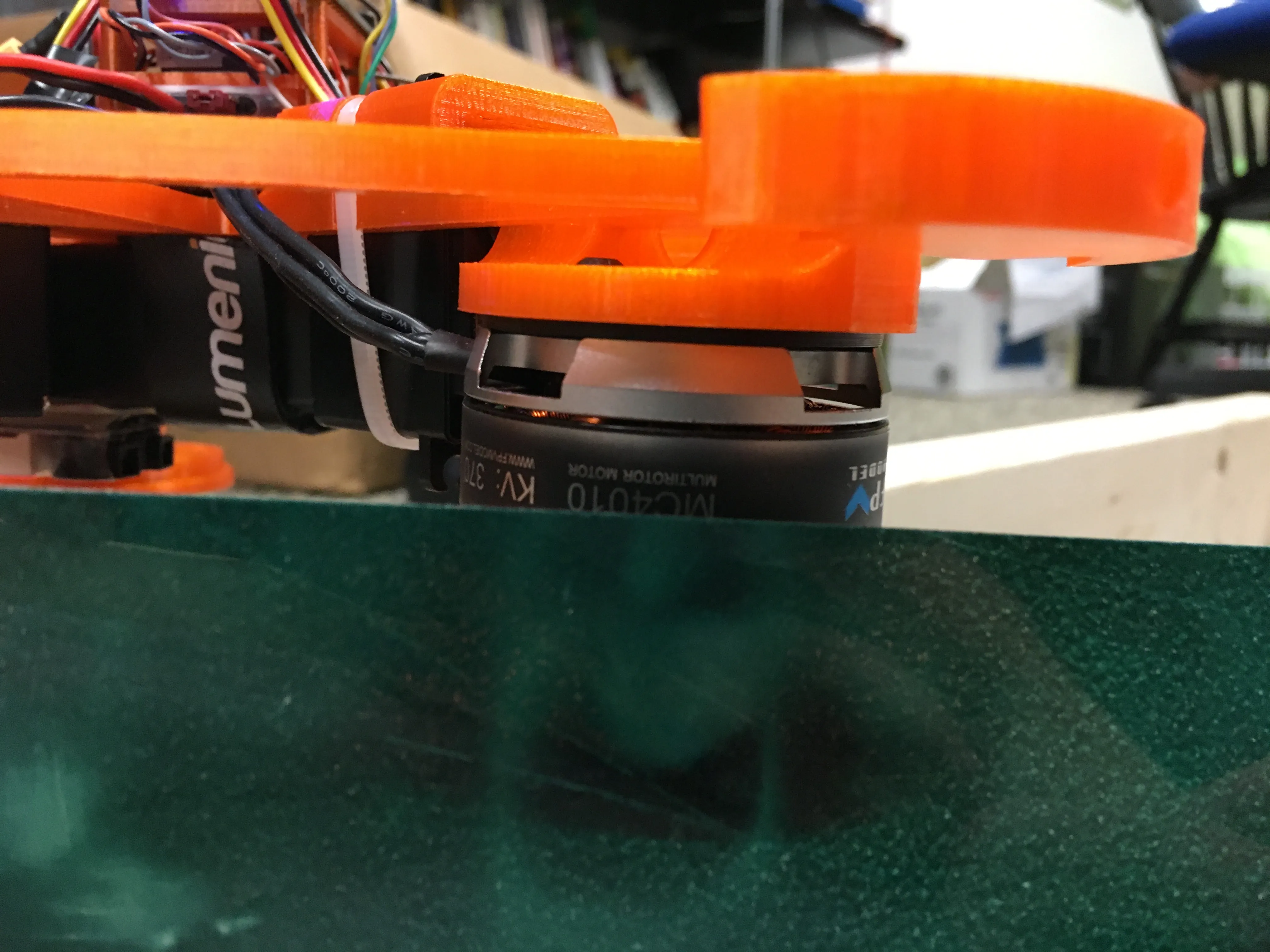
A demonstration of the electromagnetic thruster in operation. The thruster is actuated by a servo motor. Four thrusters are required for stable control of the hovercraft.
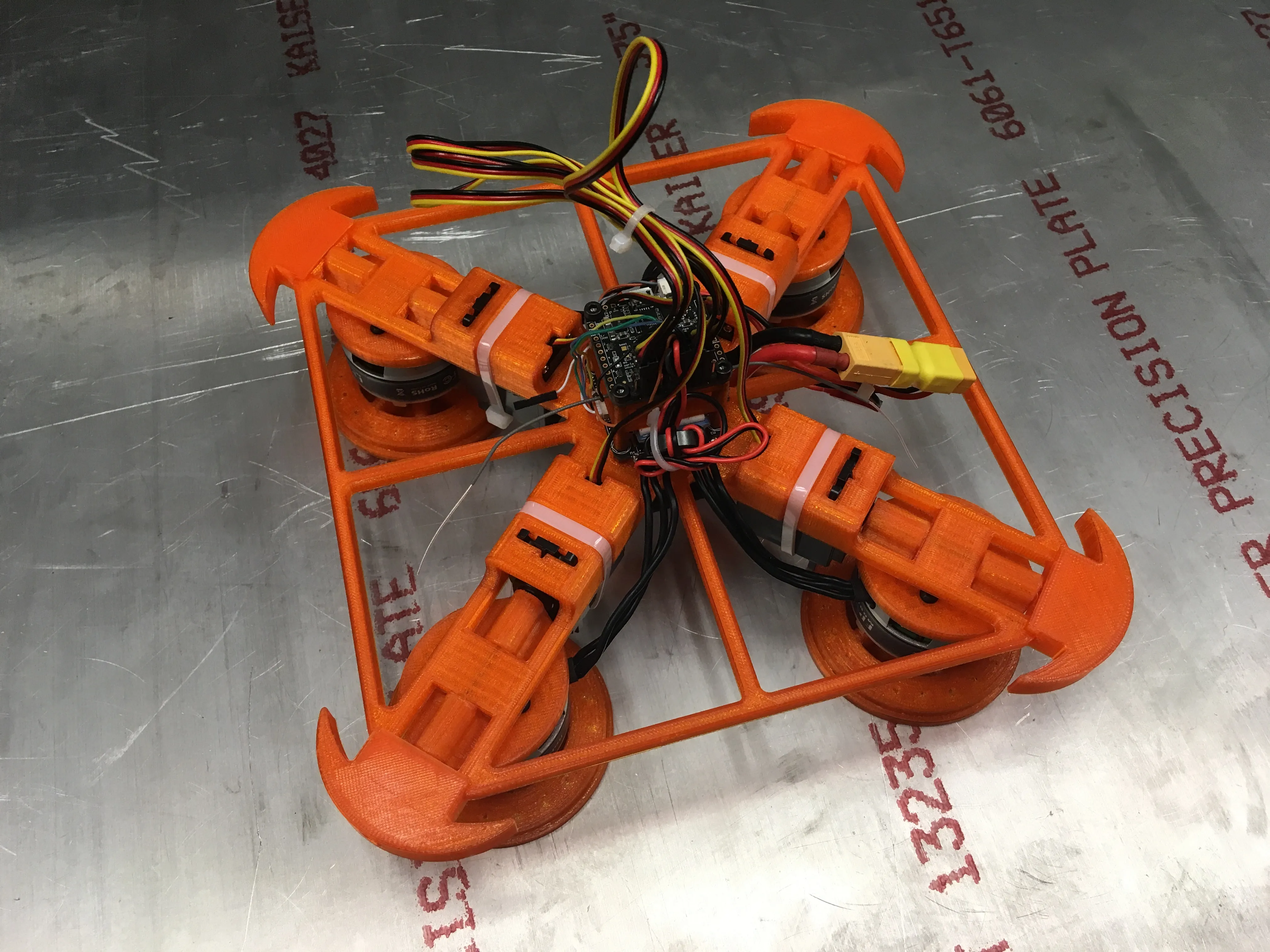
A view of the entire hovercraft. The battery is mounted underneath the frame and the vibration-isolated PID controller is mounted to the top.
A demonstration of the electromagnetic hovercraft being controlled to move about the aluminum sheet. The flight time for the hovercraft is approximately 4 minutes.